Biomechanics Lab
Dynamic Walking
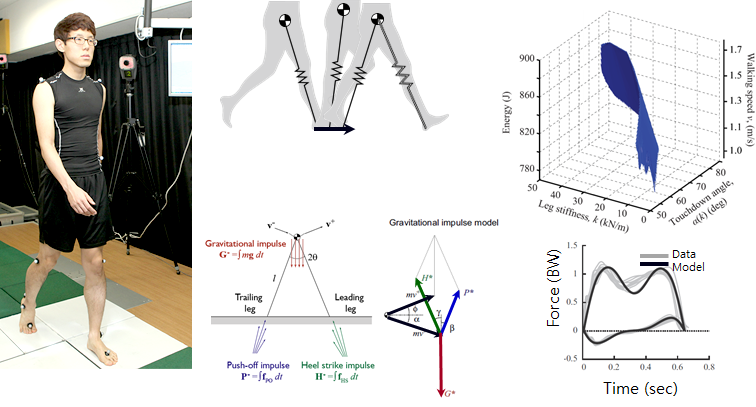
Although human walking is achieved by complicated control of multi-segmental & multi-actuated mechanism, the mechanics of the center of mass, the core of rigid body movement, is appeared to be a simple passive dynamics, which could be described by a collision of inverted pendulum or springy oscillation. The passive dynamic walking approach, therefore, could serve as a powerful theoretical framework to understand the mechanics of human walking. Due to the model simplicity, however, the current dynamic walking model, in part, lies under the limitations of qualitative description of the real human data rather than to be able to provide a quantitative prediction. Our research focuses on 1) developing a predictive collision model that quantitatively explains collision loss and their compensation, and further predict the energetically optimal gait, 2) understanding oscillatory behavior of the center of mass and the lower limb and proposing a model that quantitatively predicts the mechanics of lower limb for various walking conditions, and 3) exploring control strategy of multi-joint that achieves the previously observed simplified but predictive motion of the center of mass, all without the expense of significant model complication
Wearable motion monitoring based on mechanical relationship
Although the market of wearable motion monitoring system has been grown rapidly, the wearable devices (still?) provide only limited rough motion information, e.g. distance travelled and speed. To achieve high-quality (professional) motion monitoring for injury prevention and rehabilitation monitoring while maintaining easy use of wearable devices, the technique that extracts force information from simple wearable devices is essential. Meanwhile, the relationship between the motion of center of mass (CoM) and the ground reaction force (GRF) during walking is well represented by simple spring mechanics. Thus, to achieve high usability of wearable devices using the mechanical relationship, our research focuses on 1) estimating horizontal GRF from vertical GRF measurer using the mechanical relationship between horizontal GRF and vertical GRF, 2) estimating both horizontal and vertical GRFs from CoM motion taken by single RGB camera using the spring mechanics’ representability of CoM dynamics and 3) estimating the motion and joint moments of lower limb from single IMU on sacrum using the mechanical relationship between the kinematics and kinetics of lower limb and the CoM motion.